Upcoming Events:
- Check out our new Google Calendar for committee meeting times!
Demobot - First Draft of Polargraph
The Demobot Committee has completed a first draft of the drawing machine!
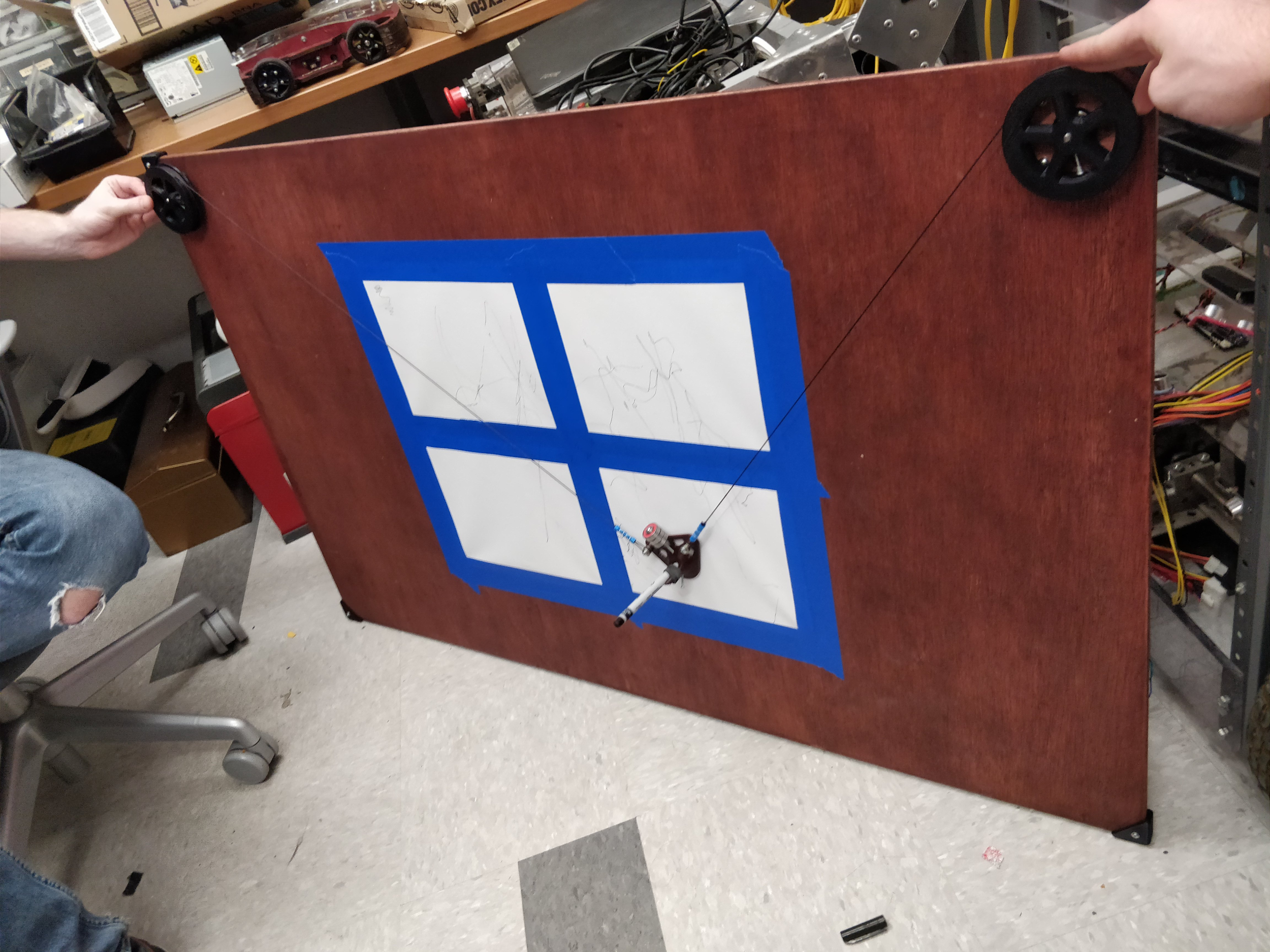
The polargraph was constructed from
- An Arduino
- Two stepper motors
- Two Pololu stepper motor drivers
- Wooden backdrop
- 3D printed pulley, carriage and string system
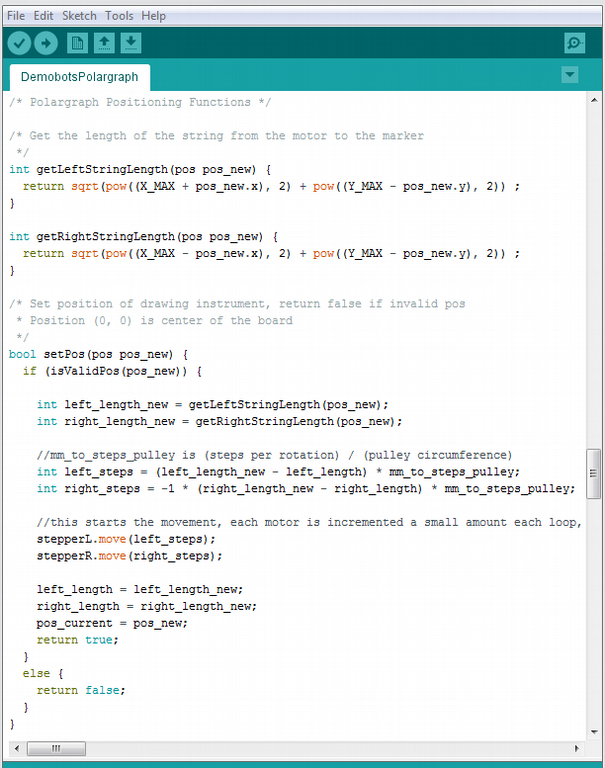
After putting together the polargraph, we created an Arduino program to control the two stepper motors. The program allows a user to send a series of coordinates to the Arduino over a Serial connection, and the polargraph connects the points together!
In the next weeks, we are also working on more movement functions for different curves, and different ways to format and send instructions to the polargraph. We also plan to add a WiFi module to the device so that it can receive inputs wirelessly. We hope to add features such as drawing representations of camera images, apps for touch screen devices that can send drawings to the polargraph, and more! In addition, we are going to add a dynamic carriage system that can lift and place the marker, using a small servo motor.
Author: Cole Thompson