Upcoming Events:
- Check out our new Google Calendar for committee meeting times!
Micromouse Update
This semester started with a bang for micromouse. We worked on building a field, printing a new chassis, and working on a pcb.
Field:
Our field is built, and is adjustable. It consists of a base, and walls that we can adjust to create different mazes for our robot to track.
With this field, we can begin to test our motor control algorithms and calibrate our distance sensors. This will allow us to test out our designs and figure out the best way to drive and navigate.
Chassis/PCB
Currently, we are building another prototype to make it easier to test out motor control algorithms, as well as working to create a new pcb as the basis for our robot in the future.
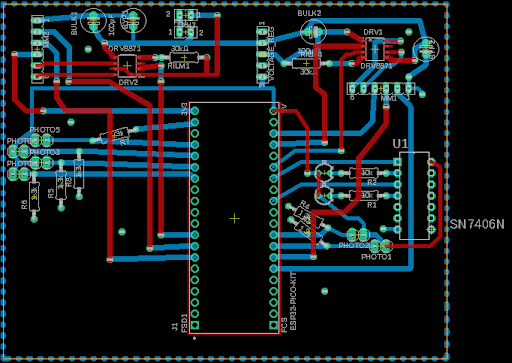
This is the current design for the PCB. We are going to change the location of the distance sensors so they are located in a more optimized location.
Author: Vamsi Ghorakavi