Upcoming Events:
- Check out our new Google Calendar for committee meeting times!
Region V - Mid Semester Update
Region 5 is making some great progress preparing for this year’s competition!
We’re currently in our “testing phase” where we assemble our mechanical design and test out our various components, and we’re approaching the start of our “fine tuning phase”, which will start with 2 weeks out to competition date. Mechanically, our robot is almost completed. Our last step is to mount our pulley suspension arm in order to enable our token sorting system. Here are a few updates on our hardware progress:
Motors:
We’re using one Arduino Nano with interrupt-enabled encoder feedback to keep track of the speed of both wheels. Currently we’re developing a PID loop to ensure that both motors are running at exactly the same speed so that the robot travels in straight lines
Servo:
We finished developing the magnet-chain system and it is now ready to use for picking up the tokens
Line Sensors:
With the sensors now placed on the chassis, we’re running tests with the software team to make sure the intersection detection system works perfectly
Stepper motor:
We’re currently setting up another interrupt-enabled feedback system with the stepper motors to know exactly how far the disk has been rotated
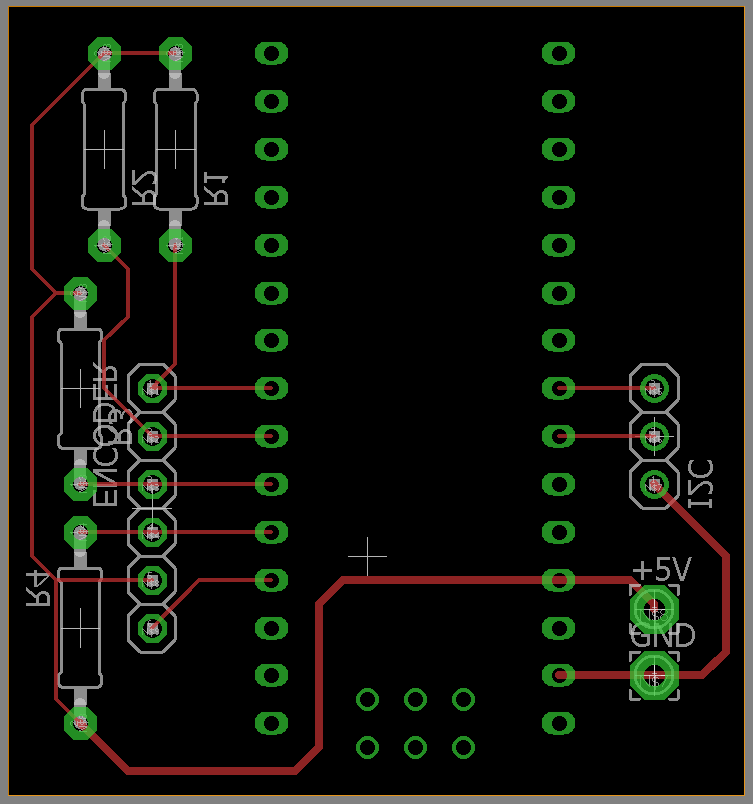
PCB design:
The Nano PCB has been finished and is now used for the motor control system (with encoder communication on the PCB)
We meet every Friday in the Makerspace. Join our slack channel #region-v to get involved!
Author: Meera Wakim