Upcoming Events:
- Check out our new Google Calendar for committee meeting times!
Demobot - Building a drawing machine!
The Demobot Committee has started this semester by undertaking a new project.
We are building a polargraph drawing machine!
The goal of this project is to use two stepper motors to control a drawing instrument. We are currently designing a pulley system and Arduino software to control the marker and draw lines on a piece of paper. Our design is modular so that it can be moved around for demonstrations, and our software will allow users to input lines to the device through a computer.

Design:
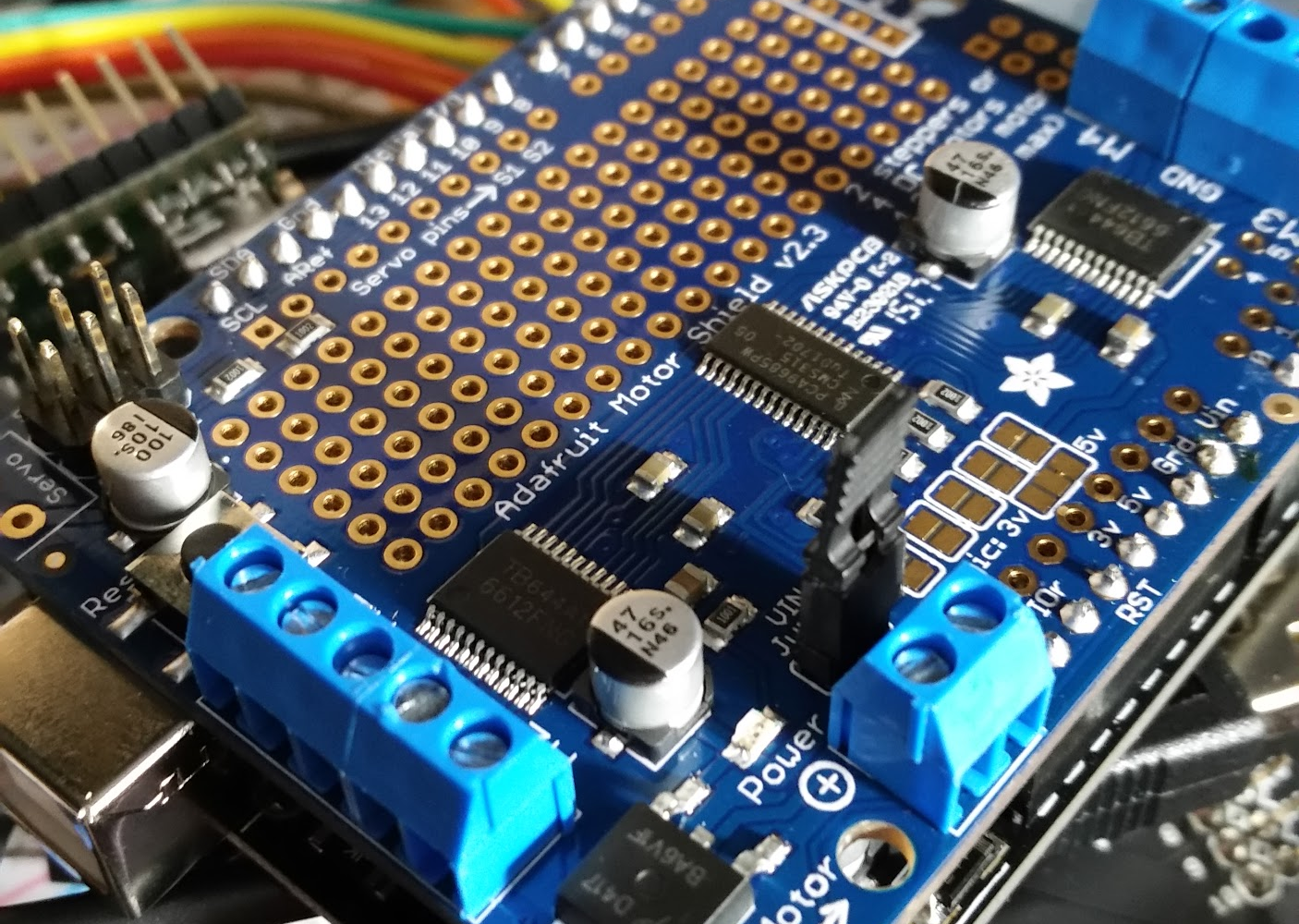
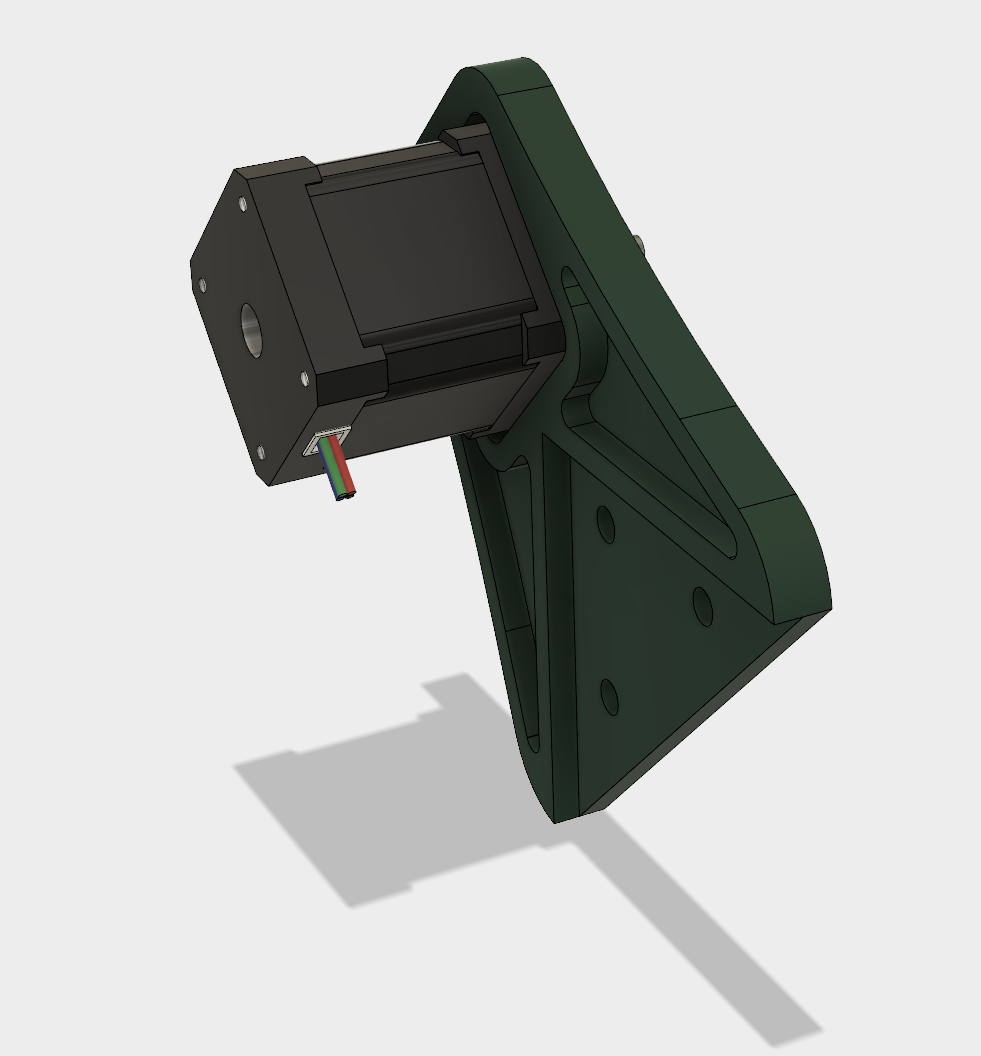
Our design uses an Arduino Uno for the controller, and we are using an Adafruit Motor Shield v2 to interface two NEMA 17 stepper motors. The motors will be attached to a 30x48 piece of ½ in plywood that will act as a drawing surface for the paper. We are 3D printing a pulley system for the motors and string, and a carriage that will hold the drawing instrument. A small servo motor on the carriage will control when the marker is touching the paper.
The Plan:
We are currently developing low level line drawing and control algorithms that will run on the Arduino. Our plan is also to develop a software interface that will run on the computer, which will allow users to draw lines, input shapes, and generate lines from an image. This data will be sent to the Arduino via Serial USB cable.
Our mechanical design is almost finished! All that is left is to 3D print the parts to test our pulley, and optimize our carriage design. In the next few meetings, we will be putting everything together and testing some line drawing.

We meet every Thursday in the Makerspace. Join our slack channel #demobot to get involved!
Author: Cole Thompson