Upcoming Events:
- Check out our new Google Calendar for committee meeting times!
Region 5
This year’s IEEE Region 5 Robotics competition team is off to a racing start!
Our team is made up of about 30 active members, and we have split into three subcommittees:
- Mechanical: frame design, CAD, and construction (machining, 3D printing, etc)
- Hardware: electrical hardware, schematic design and maintenance, wiring, and component-specific code
- Software: High level and low level software, algorithm design
The challenge we have been given this year is to sort colored steel tokens to their respective colored areas on the field.
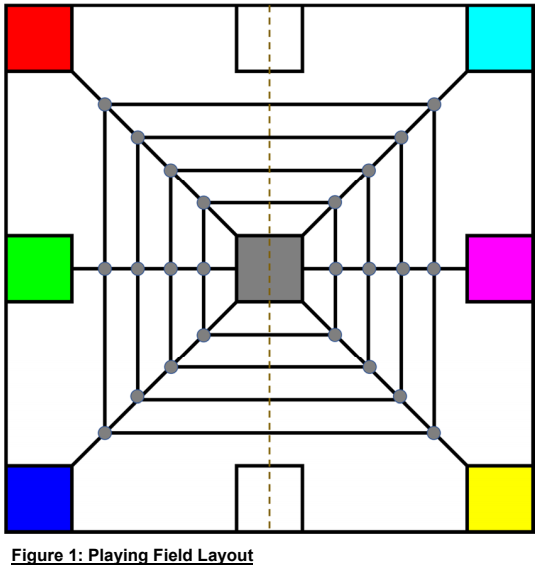
Since this an autonomous robotics competition, our design relies on sensor input to direct our movement and actions.
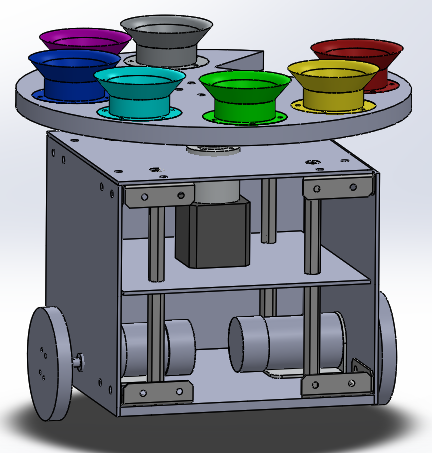
Our current robot frame design
Our frame will be machined out of aluminum, and one of our walls will consist of laser cut acrylic to allow for visibility. We are using DC motors with built in encoders for movement, and our token funnels (used for token storage) are 3D printed in colors according to the color of the token that they are meant to store. On the electronic side, we are using a system of Arduino Nanos and one main Ardunio Mega. Our sensor arrangement includes color sensors, a gyroscope, and IR distance sensors.
Our team is extremely excited as we transition from our planning and brainstorming phase into robot construction, and as all of our components come to life and start interacting with the field we’ll be sure to post updates.