Upcoming Events:
- Check out our new Google Calendar for committee meeting times!
Region 5
Our Region 5 team, the Bevonauts, has been on a fast-paced, high-momentum track since January.
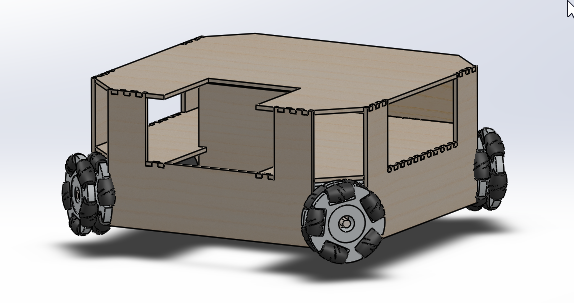
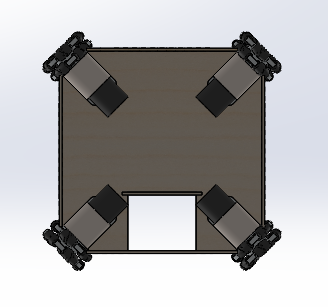
We will be attending the Region 5 competition in Denver on April 1st, and our team of about 15 RAS members has been working hard to prepare out robot for that day. We have designed a fully autonomous, holonomic drive robot that is laser-cut out of 1/8” wood. The robot uses feedback from a camera module, IR sensors, encoders, a gyroscope, and a magnetometer to navigate an 8’ x 8’ field in the competition. We have built an exact replica of the competition field in our office, which is shown below. The tasks of the competition include mapping an acrylic-covered field for hollow tunnels with live wire running through them, and opening 3D-printed cache cups to read the dice value and display it on a 7 segment LED display on top of the robot. As far as mechanical design of the robot goes, the screenshots of the CAD model below show the basic framework before any of the electronic components have been added on. We have created two shelves for our robot in order to maximize surface area for mounting. The top layer will open like a door with the hinges on the back. The U-shaped cut out in the front is for our rack and pinion robotic arm to lift the lid of the cache cover in order to read the dice. And lastly, the 60mm aluminum omni wheels powered by DC motors with built in encoders allow for holonomic drive, giving our robot the ability to traverse right angles without having to rotate. We are excited to display our completed robot in the near future and represent UT Austin in this large, national-level competition.